学部学科 : 工学部/電子工学科
教員 : プレーマチャンドラ チンタカ
所属学会 : IEEE(米国電気電子学会)/IEICE(電子情報通信学会)/SOFT(日本知能情報ファジイ学会)
画像とロボットで人々を幸福へと導く技術革新
 画像を処理すれば、その結果が目に見えます。ロボットを動かせばその動きが目にみえます。そういった目に見える処理結果または動きが、自分の目標としている結果または動きとなるように、楽しくアイディアを考えたり、実験したりします。そして、その目標を人間を幸福へと導くものとなるように設定し、研究に励みます。さらに、考えたアイディアを国内外の関連学会で発表し、議論をして頂きます。
画像を処理すれば、その結果が目に見えます。ロボットを動かせばその動きが目にみえます。そういった目に見える処理結果または動きが、自分の目標としている結果または動きとなるように、楽しくアイディアを考えたり、実験したりします。そして、その目標を人間を幸福へと導くものとなるように設定し、研究に励みます。さらに、考えたアイディアを国内外の関連学会で発表し、議論をして頂きます。
■ 社会のために
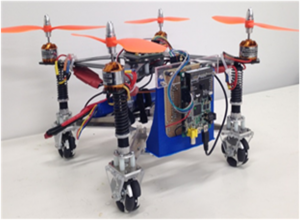
当研究室では、主に移動ロボット、飛行ロボット、それらを統合した空陸両用ロボットと画像処理について研究します。災害現場での応用など社会に役に立つ技術革新を目指して、励んでいきます。
 ■ 研究テーマ
■ 研究テーマ
●空陸両用ロボットの移動中の先方障害物を飛行して回避
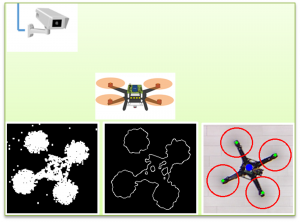
●固定インフラカメラと飛行カメラを組み合わせた屋内環境の対象物検出システム
●車載カメラ画像解析により路面障害物検出及び回避
■ クローズアップ
2016年度から設立したハードとソフトの両面が体験できる研究室で、研究を楽しんでくれる学生さんを大歓迎します。外国出身教員が運営するため、国際的な環境でもあります。研究指導言語は日本語、英語、シンハラ語から選択可能です。